
各类静力水准仪的原理详解和选型技巧
一、前言
结构的空间几何位置及形态的变化,是评价建筑结构安全的重要指标。可以用倾斜、沉降、位移、裂缝等参数的相对变化来衡量结构的变化。对这些参数进行测量,并根据参数的累积变化、变化速率等动态指标对结构的健康安全做出评价的工作,业内叫做结构健康监测,也有叫变形监测的。
对结构影响最大的因素是重力,因此以结构的竖向位移最能代表结构位置的变化。竖向位移通常也简称沉降。对竖向位移的观测也叫沉降观测。
传统的人工测量耗时太多,监测周期长,只能反应变化的长期趋势。难以反应快速变化的竖向位移。因此业内人士发明了静力水准仪,用来自动化测量竖向位移。
二、静力水准仪的原理及分类
静力水准仪是根据“连通管”原理来进行沉降监测的,即两端开口的U型管道,注入液体后,液体在大气压力和重力的作用下,最终会保持在同一个高度。
根据这个原理,市场上出现了两种不同形态的静力水准仪,分别为液位式静力水准仪和压差式静力水准仪。液位式水准仪是通过测量不同传感器的液位变化的高度来计算沉降的,而压差式静力水准仪是计算不同传感器间的液体压力变化量再除以液体的密度和重力加速度得到沉降值的。
液位式水准仪按照液位测量的方式可分为磁致伸缩、超声波、电容三种。
三、磁致伸缩液位计的原理及优缺点:

磁致伸缩指铁磁质中磁化方向的改变会引起介质晶格间距的改变,从而使得铁磁质的长度和体积发生改变的现象。磁致伸缩液位传感器是利用磁致伸缩效应,利用两个不同磁场相交时产生的应变脉冲信号被检测到的时间来计算出磁场相交点的准确位置,从而测量出液位的高度。
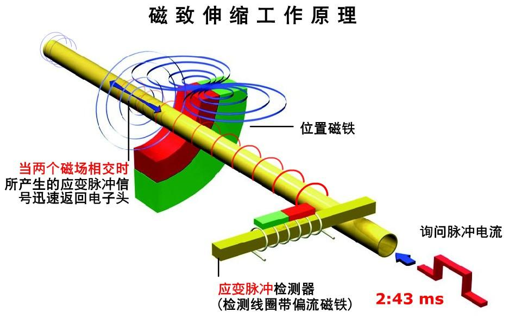
在磁致伸缩液位计的传感器测杆外配有一浮子,此浮子可以沿测杆随液位的变化而上下移动。在浮子内部有一组永久磁环。当脉冲电流磁场与浮子产生的磁环磁场相遇时,浮子周围的磁场发生改变从而使得由磁致伸缩材料做成的波导丝在浮子所在的位置产生一个扭转波脉冲,这个脉冲以固定的速度沿波导丝传回并由检出机构检出。通过测量脉冲电流与扭转波的时间差可以精确地确定浮子所在的位置,即液面的位置。
磁致伸缩液位计价格较为便宜,较多的用于石油、化工原料储存、工业流程、生化、医药、食品饮料、罐区管理和加油站地下库存等各种液罐的液位工业计量和控制,大坝水位,水库水位监测与污水处理等。近些年有业内人士用来做建筑结构的沉降观测。
磁致伸缩液位计的测量精度达到1mm,某些最新产品精度已经可以达到0.1mm,但价格较贵。磁致伸缩液位计测量的是浮子的移动高度,与液体的密度无关。能够直观的通过透明罐体看到液位的变化。
因使用浮子,存在移动的部件,且体积难以缩小,某些地方有碍观瞻,使用受限。量程更是受限,常规为100-200mm,很难做到大量程。

在振动环境使用时,会严重影响精度,液位计最好安装在非振动的工况条件下。
由于是靠磁场变动来获取液位变动的,因此抗电磁干扰能力较弱,不建议在电厂、高铁接触网附近、大型电力设备设附近使用。
如果温度变化较大,浮子内部空气的体积变化将导致浮力变化,浮力此时将带来较大的系统误差。因此适合在相同的气温下做数据的对比。在昼夜温变较为剧烈的地方必须做防热、隔热处理。
值得一提的是,磁致伸缩液位计主要是工业控制用途,结合PLC等设备使用,因此基本是模拟的4-20mA电流输出。需要通过485变送器转为数字信号后才能进入采集仪传输和使用。

四、超声波静力水准仪的原理及优缺点:
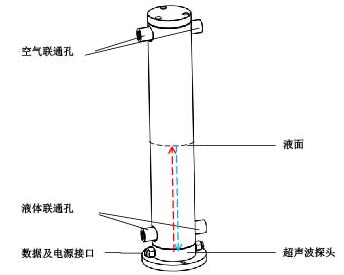
超声波静力水准仪的基本原理和磁致伸缩液位计一样,不同的是用超声波来测量液位的高度。由装在仪器底部的超声波探头发出超声波信号,到达液面被反射回来,根据探头接收到反射回波的时间差与超声波在液体中的传播速度,可以算出液体高度;分辨率可达0.01mm。
超声波静力水准仪的优点是无机械活动器件,传感器不和液体接触,抗电磁干扰能力强。缺点是受温度影响变化较大。液体中水的速度以声速传播,有研究表明,声波在水中声速与温度的关系,与水的成分有关。声音在自来水和蒸馏水中的传播速度的变化趋势明显不同,与自来水中的杂质有关,而自来水的成分复杂。不同杂质在不同温度下对声波的散射、衰减、吸收均有较大差异。虽然超声波静力水准仪在短时间内相同液体介质情况下的精度可达到0.1mm,但这些外界因素影响了超声波静力水准仪准确度的进一步提高。因此现场使用时尽可能使用蒸馏水,以避免水中杂质的影响。
超声波静力水准仪的基本原理和磁致伸缩液位计一样是靠液位测量实现功能的,因此体积较大,安装不便。
影响超声波静力水准仪的因素还有液体表面和内部的气泡、悬浮物、波浪或液体气化,引起反射混乱而产生的测量误差。使用时需要采取保温隔热措施,避免太阳照射带来的液体蒸发、气泡等带来的影响。
影响超声波静力水准仪使用的另外一个重要因素是量程太小,通常仅为50-300mm。安装使用时对位置要求较高,需要人工用水准仪进行抄平,把静力水准仪安装在同一个水平上,以尽可能使用有限的量程。
超声波静力水准仪属于精密的娇气的仪器,对使用环境要求较高,适合于室内使用,如科研院所等环境温度变化较小,液体介质受控的试验室。在室外工地等项目中较少使用。
历史上还有过电容式静力水准仪,是通过测量液位变化导致的电容变化间接获取液位位置的。因结构复杂,可靠度低,市场上已经很少见到此类“文物”设备了。
五、压差式静力水准仪的原理及优缺点
压差式静力水准仪是用压力传感器测量液体压力的变化量再除以液体的密度和重力加速度得到液位变化的。因此各项关键指标高度依赖于压力传感器和计算的MCU及算法。随着科技的发展,测量液体压力的传感器不断出现,如扩散硅、MEMS等固态传感器,具有体积小、性价比高,数字化,容易和MCU集成等优点,得到了广泛的应用。因此数字压力传感器也在静力水准仪中得到较多应用。

根据帕斯卡原理,液体的压力仅与高度有关、因此静力水准仪的体积可以做的非常小,便于安装使用。
压差式静力水准仪通常使用扩散硅压力传感器实现压力测量的。因此可以在体积不便的情况下,根据需要选择合适的量程与精度。一般的模拟压力传感器的精度0.1%FS,分辨率为0.01%FS。其中FS表示量程。也就是量程越大,精度越低。这和液位测量原理的静力水准仪有所不同。比如1米的量程为1000mm,精度为1mm,分辨率为0.1mm。需要注意的是,某些商家为了某些目的,标注的精度为分辨率,甚至有的根本不知道精度的意义,直接标注分辨力。
随着MEMS数字传感器的发展,在同一片硅晶圆上刻蚀硅悬臂阵列和测量悬臂阵列间的电容变化的数字电路。这些高科技不但降低了生产成本,关键是提高了精度和稳定性。分辨率与MCU的位数有关。如8位的MCU的分辨率位2的8次方,表示把量程平均分为128份;24位的MCU表示把量程等分位2的24次方。例如1米的量程,使用24位的MCU时,分辨率为1000/224=0.000059604644775390625毫米。远远超过了实际的精度,没有实际意义。
静力水准仪使用水来做介质,对气温极为敏感。如低温时容易结冰、高温时容易气化气泡等。需要采取防冻保温措施。如在气温低于0°时,使用防冻液代替水。汽车水箱使用防冻液即可。高温时,采用保温隔热泡沫材料进行隔热,避免温差过大。可以采用相邻日期同一个时间的数据做对比,以降低温度的影响。

以上这些类型的静力水准仪都是利用连通器原理,在管道和容器内的液体达到液面平衡时,实现液位测量的。由于流动的水具有惯性、粘滞性及温度差,必须等水彻底停止流动、系统温度趋于一致后才能准确测量,否则会导致数据波动剧烈导致频繁的误报。如果被测物有外力作用、振动、管道较长、串联的测点较多时,水面彻底平静需要较长时间,难以实现实时、准确的动态位移测量。
下图是安锐科技在2017年使用压差式静力水准仪,测量贵州水红铁路某隧道路基边墙沉降的数据曲线图情况。红色表示测点竖向位移数据曲线,黑点表示雷达探测到有列车经过时做了自动标注的数据曲线。

从图中数据曲线可看出,当列车经过时,数据显示边墙出现厘米级的沉降,并在列车驶离后回弹至原来的位置,与现场实际完全不符。如果据此设定报警阈值,将导致极为频繁的误报警。当时的解决办法是用雷达传感器来探测列车。当列车经过时,数据丢弃,不触发报警。但问题是如果列车经过时出现了严重的沉降,则无法反应出来,有可能导致严重的事故。因此常规的静力水准仪只能用来做长期沉降的趋势观测用途。无法用在实时监测报警和控制用途。这限制了静力水准仪的使用范围和用途。
六、动力水准仪的原理及优势
随着结构健康监测的要求越来越高,对竖向位移的测量也出现了新的要求。以此同时,物联网技术的发展,也给结构健康监测行业带来了新的技术和解决方案。如高密度列车经过时路基的沉降,各种极端天气区域的新建项目逐渐增多、桥梁动态挠度测量。根据位移实时控制机械设备等用途层出不穷。为了克服静力水准仪受温度、振动、介质、环境电磁干扰等因素的影响,深圳安锐科技有限公司发明了动力水准仪。动力水准仪在实现动态挠度实时测量的同时,还可以完全实现静力水准仪的所有功能。是静力水准仪的升级换代产品。

动力水准测量系统由多个动力水准仪和封闭的基准传递管组成。当系统注满液体时,封闭的塑胶管道外壁的大气压力和管道内部的液体压力形成平衡。
测量出多个传感器的相对压力值,提取出重力加速度单一因子导致的压力影响值,再融合其他传感器的数据进行多传感器的数据融合实时矫正计算,即可得到非常准确的相对动态竖向位移。不再需要等待液面达到静止状态时也能准确测量竖向位移的相对变化量。
为了在同一个条件下对比静力水准仪和动力水准仪的性能,做了对比试验:

把静力水准仪和动力水准仪安装到同一个外壳中。在台面静止5秒后拿起放到一个高度为130mm的盒子上,过10秒后从盒子上推下跌落回台面。从数据上可看出从手动拿起传感器、放置传感器、传感器跌落到台面后反弹、静止的过程。传统的静力水准仪在静置一段时间后的数据趋于稳定,但在振动时,数据波动很大,甚至完全失真。特别是从高处跌落到台面时,数据为-1227.76mm,然后振幅逐渐衰减为0,数秒后数据有两个小的波动,推测为液体振荡的驻波反射。而同一个试验中的动力水准仪表现让人欣喜。传感器从台面到盒子上的光滑位移曲线,不但能直观的看出数据的准确性,还能看出试验人员的小心翼翼。放置10秒后,两种传感器的数据趋于一致。由于有液体管道的牵绊,从盒子上推落传感器时,数据显示并不是一个很陡的自由落体运动,细微处是个曲线过程;撞击台面后反弹起53.533mm,然后回落到0mm的状态。数据与试验过程完全相符。
从数据对比图中可看出,同样条件下,静力水准仪的数据波动极大,而动力水准仪的数据曲线光滑,准确的还原了测点的移动过程。
由此可见动力水准仪进行测量,能够克服传统静力水准仪的缺点,实现动态位移的高精度准确测量。
有了能够准确测量出竖向位移的传感器,可以实现很多新的应用,例如:
1、测量中小桥梁在车辆等活载作用下的竖向动态位移和低阶模态;
2、测量轨道、轨枕和路基在列车作用下的竖向位移变化;
3、测量高压注浆时路基的隆起,并联动控制注浆压力;
4、下穿高铁涵洞施工过程中,列车经过时轨道的动态竖向位移实时测量和联动报警。
动力水准仪可以同时测量静态沉降、动态位移、三轴加速度、三轴倾斜角度及温度共计5个参数。
多个动力水准仪通过物联网关实现高精度时间同步、海量数据异步传输及边缘计算,提取出有效数据后再上传云端。
动力水准仪的缺点及使用注意事项:
作为静力水准仪的升级换代产品,动力水准仪也有其缺点,需要在使用时注意。
1、极高的采样频率会带来数据冗余
动力水准仪的最高采样频率30Hz,能满足结构类大部分的监测需求。如果不加以区分静态位移和动态位移的测量模式,那么极高的采样频率会带来数据冗余的问题,导致存储、计算及传输等资源的浪费。因此需要根据需要采用不同的触发方式,实现高低频测量模式的切换。平时工作在采样较低的采样频率下,触发后立即开始高频动态位移的同步采集、传输及计算。
触发模式为:
(1)、内置的加速度传感器数据联动。如检测到加速度超过一定限值时触发;
(2)、其他独立的传感器数据触发。如微波传感器检测到列车到来时触发;
(3)、现场手动触发。物联网关上有手动开关,开关状态改变时触发;
(4)、定时触发。通过平台软件远程电脑终端手动触发;
2、压力波衰减
压力波在液体介质中以声速传播,传播的时间差和衰减幅度与距离成比例关系,如果测点之间的距离较长的项目且精度要求很高时,根据压力波的相关性在算法上做出补偿。
3、缺乏高精度的横向位移同步测量方式,需要间接获取
七、动力水准仪应用典型案例:
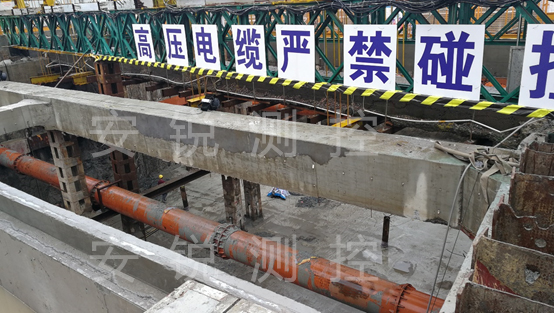
《杭州望江路过江隧道高压电力管廊挠度实时监测及控制项目》
2018年,中铁十四局在下穿钱塘江的过江隧道施工时,在江北明挖段遇到国家电网的两座高压电力管廊。

由于修建年代久远,电力管廊结构极为脆弱。施工方在管廊两侧架设了钢便桥,下穿工字钢进行托举保护。由于钢桥的容许挠度远远大于电力管廊的安全挠度。因此需要实时监测电力管廊的竖向位移,并根据实时位移的数据,联动控制16个千斤顶对电力管廊的竖向位移做出逆向补偿,保证电力管廊的位移始终在安全限值内。
最初使用静力水准仪测量电力管廊的竖向。但测试时发现只要一个液压千斤顶动作,所有的静力水准仪数据全部大幅度变动,且持续较长时间才恢复正常,无法实现挠度实时补偿的设计目标。

因此设计了第一版的动力水准仪,并先后在110KV和220KV两座高压电力管廊上成功的实现了测控目标。

使用先进的传感器和联动控制执行设备,实时监测和控制土建结构的动态位移,开创了物联网在结构安全领域的深度应用先例,保证了电力管廊安全,确保隧道建设顺利完工。

随着物联网技术的发展,会有越来越多的物联网技术跨界应用到土建领域,提高土建行业的生产效率,保障建筑结构的安全。
